
 ベイヤーとフォビオンの違いについて紹介しています。
ベイヤーとフォビオンの違いについて紹介しています。RGB
イメージセンサーは、光を赤(Red)緑(Green)青(Blue)の3色に分解、それぞれの色の強さを段階分けして記憶することで色を取り込む。3色の段階分けは、色の強さに応じて0~255の256段階で記憶されることが一般的で、RGB(赤緑青)をどのように混ざて表示するかによってほとんどの色を作ることができる。例えば、図1のようにパソコンに取り込んだ写真を最大限まで拡大して1画素の色を計測すると、赤色の四角で囲まれた色は、赤(R)が0~255の256段階中で69、緑(G)が120、青(B)が171の強さによって色が成り立っていることがわかる。この1画素が何百万、何千万単位で集まることにって1枚の画像が出来上がる。ベイヤーセンサーとフォビオンセンサーは、このRGBをどのような方法で取り込むかで違った方法を取っている。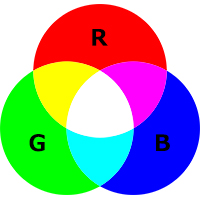
ベイヤー(ベイヤー方式センサー、ベイヤー配列)
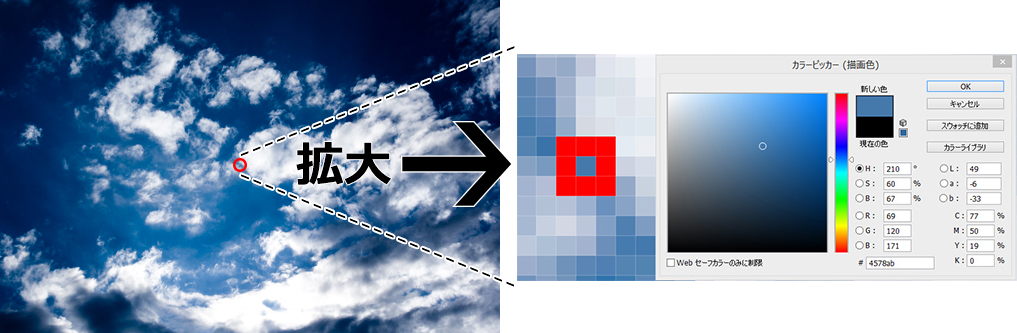
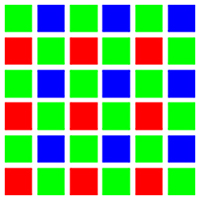
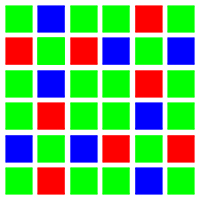
ベイヤー配列のカラーフィルターにより光を取り込む方法。イメージセンサーは色の識別ができず、光の強弱しか判断できない。そのため、イメージセンサーの前に、色を識別することができるRGB配列のカラーフィルターを置き、このフィルターに光を通すことで色を取り込んでいる。カラーフィルターは、赤(Red)緑(Green)青(Blue)のフィルターを特定の配列によって設置することで構成される。図2にように配置は、ブライス・ベイヤー氏が発案したことでベイヤー配列と呼ばれ、ほとんどのカラーフィルターがこの配列を使用している。G(緑)が多いいのは、人間の視覚に似せたため。ベイヤー配列以外にも富士フィルムが発案したX-Trans CMOSセンサーの配列などがある。カラーフィルターは、Rのフィルターでは赤の色情報だけ、Gなら緑の色情報、Bなら青の色情報だけを取得できる。例えば、光がBのカラーフィルターに入光した場合は、青(Blue)の色の強さだけを取り込むことができる。しかし、1画素は赤(Red)緑(Green)青(Blue)の3色の色情報を持つことで初めて色の表示をすることができため、青(Blue)の色情報だけでは不十分である。残りの赤(Red)と緑(Green)の色情報は、周囲の画素から予想して補完する処理が行われる(デモザイク処理)。
足りない色情報を補完する時に、予想が失敗して実際の色とは異なる色情報が補完される場合がある。これが偽色やモアレである。偽色やモアレは、規則的な模様を撮影した時に発生することが多く、ローパスフィルターと呼ばれるフィルターにより模様をぼかすことである程度の発生は抑えられる。しかし、同時に画像の解像度が落ちてしまう。

フォビオン(Foveon X3、Foveon三層CMOSセンサー)
カラーフィルターではなく、RGBのシリコンを3層に重ねることで色を取り込む方式のセンサー。1画素ごとにRGB3色の色情報を取り込めるので、デモザイク処理をする必要がない。デモザイク処理をしないために、偽色やモアレが発生せず、ローパスフィルターを取り付ける必要がなく、画像の解像度が落ちない。デメリットは、画像処理に時間がかかることや、高感度に弱くノイズが出やすい。| ベイヤー | フォビオン | |
|---|---|---|
| ローパスフィルター | あり (ローパスフィルターレスもある) | なし |
| カラーフィルター | あり | なし |
| 偽色 | あり | なし |
| モアレ | あり | なし |
| 高感度性能 | ○ | × |
| 製造 | ○ | × |









